
Introduction
Le Gyroscope
Léon Foucault est un physicien ayant travaillé sur la lumière et le mouvement de la Terre, connu essentiellement pour le pendule et le gyroscope portant son nom, qui lui valent d’ailleurs l’attribution de la médaille Copley de la Royal Society.
Dans le cas du gyroscope, créé en 1852, Foucault s’est fortement inspiré d’un appareil construit par l’allemand Bohnenberger. Quelques pistes avaient déjà été explorées dès le XVIIIe siècle notamment grâce à des disques mis en rotation mais il s’agissait uniquement de créer un horizon artificiel stable en mer, l’appareil de Bohnenberger quant à lui met en évidence les mouvements de précession des équinoxes et de nutation, mouvements qui seront détaillés par après. Cet instrument a été construit en 1810 bien avant Foucault donc, d’autres appareils ayant été construits dans l’intervalle séparant cette date de l’époque du scientifique.
Certains avaient déjà avancé l’idée d’une possible démonstration de la rotation terrestre sans qu’aucun développement véritable n’ait jamais vu le jour. Il pourrait au premier abord sembler que le travail fut facile pour Foucault par la suite mais cet appareil, non seulement destiné à un autre usage, était loin d’être idéal du simple point de vue expérimental. Foucault se devait donc de l’améliorer et de l’adapter à ses visées.

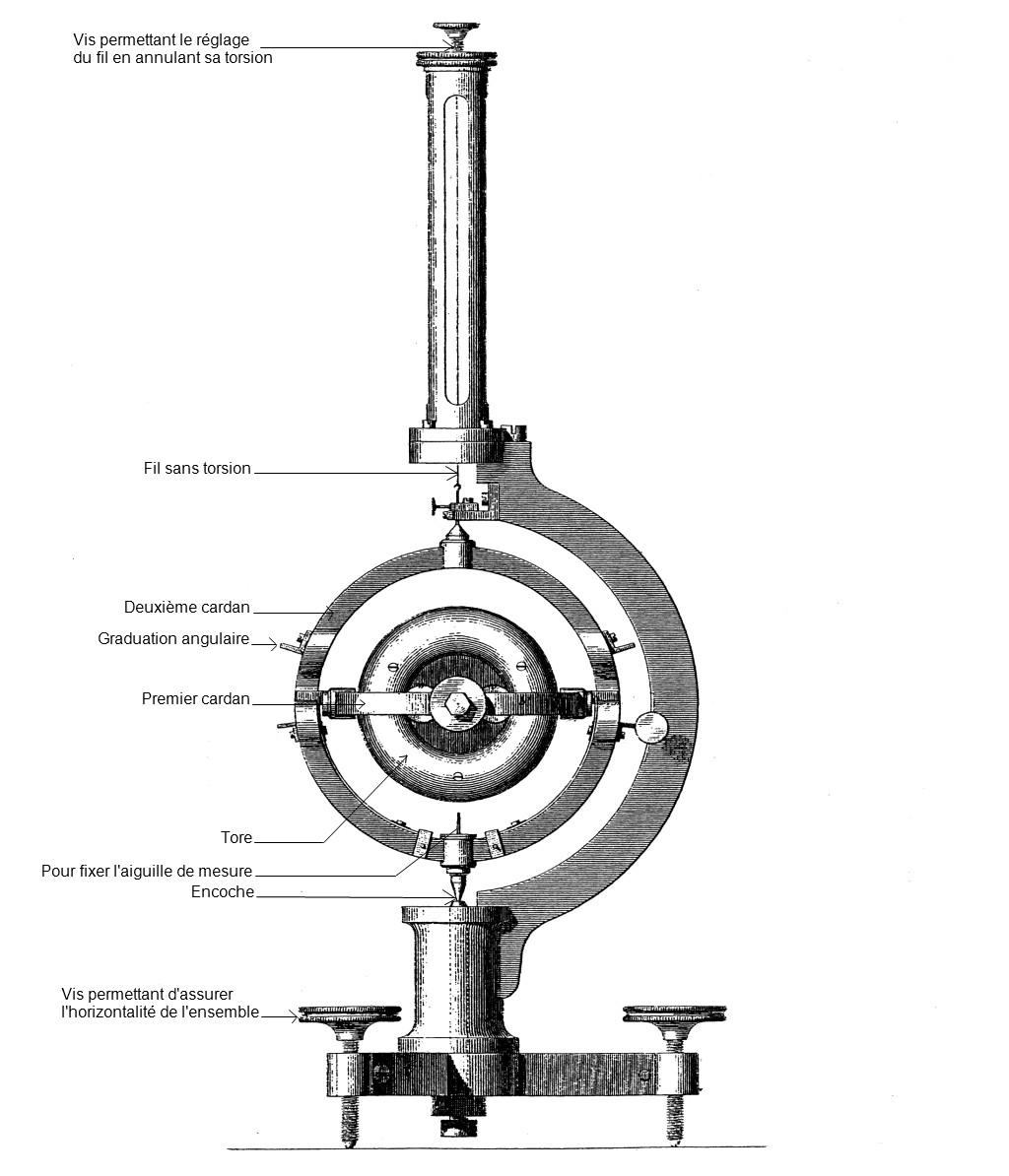
Description technique :
L’utilité du gyroscope
Dans le cadre de l’aviation, l’horizon artificiel dont dispose les pilotes sur leur tableau de commande est basé sur ce principe, démontrant que la Terre est une surface plane puisque à aucun moment le gyroscope ne change d’inclinaison malgré la supposée sphéricité de la Terre.
Si la Terre était sphérique, en volant sur plusieurs milliers de km, l’horizon artificiel devrait indiquer une inclinaison très importante puisque l’avion suit la courbure terrestre mais que le gyroscope qui fait fonctionner l’horizon artificiel garde sa position d’origine par ses propriétés de rigidité dans l’espace.
Nombres de personnes parlent de petits systèmes « érecteur » qui permettraient au gyroscope de corriger son inclinaison, cependant en contactant les fabriquant d’horizon artificiel il est reconnu que l’horizon artificiel des avions n’est doté d’aucun appareil de correction mécanique, électrique ou électronique, en fait seul un gyroscope et quelques systèmes d’engrenages sont présents dans les horizons artificiels.
Pour finir, en admettant que les horizons artificiels soient dotés de systèmes de correction, permettant à un avion d’établir en tout point de l’espace son rapport avec la Terre, il est simple en s’achetant soit même un gyroscope de s’apercevoir qu’aucune rotation Terrestre n’est présente, car si tel était le cas, une personne se situant à l’équateur verrait la position de son gyroscope s’inverser toutes les 12h puisque celui-ci aura effectué une demie-rotation Terrestre, le faisant se déplacer par rapport à l’espace n’étant pas composé lui-même de systèmes complexes tel l’horizon artificiel d’un avion.
Le gyroscope a prouvé que la terre tourne !
Les trains monorails
On estime le premier monorail dans le début du XIXème siècle. Un monorail hippomobile construit en Russie par Ivan Elmanov, le rail supporté par des pieux contenait alors des roues permettant aux wagons de glisser.
On peut maintenant compter 6 catégories de train monorail :
- Le « faux » monorail qui utilise plusieurs rails

Ce train a en vérité trois rails, un seul au sol donc certains l’appellent monorail mais deux le soutiennent au-dessus. L’exemple de la photo est celui inventé par Howard H. Tunis qui a circulé dans le Bronx (New York) en 1910. Il n’y a eu aucune commercialisation de part un déraillement la même année qui fit fuir les investisseurs.
- Le monorail monté à cheval sur un rail central surélevé
Le monorail de Duchamp fut mis en service à l’exposition de Lyon en 1872 sur 1 km. Les wagons étaient à cheval sur la voie située à près de 4 m du sol et le principe de traction par câble était proche du téléphérique.
Le plus connu reste celui Charles Lartigue dont le prototype roula en 1880 en Algérie pour transporter l’alfa et fut sans doute le premier monorail fonctionnel sur grande distance soit 90 km. Pour des raisons politiques (guerre civile d’Irlande) et financière le projet fut arrêté.
- Le monorail suspendu

Le système d’équilibre de ce monorail simple : tout le véhicule, avec son centre de gravité, est situé au-dessous du point de suspension.
De nombreux monorails de ce type ont été réalisés et certains sont encore en exploitation aujourd’hui comme le monorail de Wuppertal en Allemagne. Créé par Eugen Langen, il a été construit en 1900 et mis en exploitation en 1901. C’est le plus vieux système de monorail encore en utilisation au monde.
Le monorail de Wuppertal comprend une ligne aérienne composée de 20 stations sur un parcours de 13,3 km. Il est emprunté chaque jour par 82 000 passagers.
- L’aérotrain Bertin
 L’aérotrain est un véhicule glissant sur un coussin d’air au-dessus d’une voie spéciale en forme de T inversé.
L’aérotrain est un véhicule glissant sur un coussin d’air au-dessus d’une voie spéciale en forme de T inversé.
L’aérotrain est propulsé par une turbine sans contact avec la voie.
C ’est une invention française, due à Jean Bertin, qui n’a jamais connu d’exploitation commerciale mais dont le nom « Aérotrain » est une marque utilisée comme nom en France, la marque ayant été déposée par la société Ber
En France, ce projet a bénéficié, pendant un temps, de l’appui des pouvoirs publics, notamment du Comité interministériel à l’aménagement du territoire (CIAT) qui l’avait retenu en 1967 dans la perspective d’assurer des dessertes de voyageurs sur des distances allant de 100 à 500 km à des vitesses de 250 à 300 km/h (caractéristiques qui en font le précurseur du TGV).
Cependant, le projet fut finalement abandonné en faveur du TGV.
- Le monorail à susptentation magnétique
Il utilise le phénomène de suspension électromagnétique et n’est donc pas en contact avec des rails, contrairement aux trains classiques. Ce procédé permet de minimiser les frottements et d’atteindre des vitesses plus élevées : le record est de 603 km/h (obtenu en 2015), soit 28 km/h de plus que le record d’un train classique (574,8 km/h par une version modifiée du TGV en 2007).
Il existe deux principaux types de trains à sustentation magnétique :
- Le type à suspension électromagnétique (ou EMS), utilisant des électro-aimants classiques. La traînée électromagnétique est ici très faible, voire nulle. Le Transrapid allemand en est le principal exemple. Le rail « porteur » contient des aimants ou des électroaimants. L’interaction entre les aimants à bord du train et des aimants disposés le long de la voie crée une force magnétique induite qui compense la gravité et permet la lévitation. Ces aimants repoussent le train vers le haut et assurent l’existence d’une garde suffisante entre le « rail » et le train ce qui affranchit le véhicule de toute perte due à la friction. Il apparaît cependant une traînée magnétique. Par ailleurs, aux vitesses élevées, c’est la résistance aérodynamique qui représente de loin la principale résistance à l’avancement.
- Le type à suspension électrodynamique (ou EPS), utilisant des aimants supraconducteurs. Des bobines supraconductrices sont placées dans le train et des électro-aimants sont placés le long de la voie. Lorsque le train se déplace, un courant est induit dans la voie. La force de Laplace résultante fait léviter le train. Le déplacement du train engendre une traînée électromagnétique très importante, d’où une consommation énergétique élevée.
Le projet le plus abouti est le Maglev (Magnetic Levitation) japonais.

- Le monorail gyroscopique
Ce train utilise un système à base de gyroscope pour se stabiliser. En effet, le véhicule roule sur un rail conventionnel unique, de sorte qu’en l’absence d’un système d’équilibrage, il ne peut que tomber. Trois systèmes ont été présenté depuis le début du XXème siècle.
Le premier système vient de Louis Brennan, un ingénieur irlandais-australien. Il a démontré avec succès le système le 10 Novembre 1909, à Gillingham, Angleterre, mais le système n’a jamais été adopté.

Les gyroscopes étaient placés dans la cabine, bien que Brennan ait prévu de les mettre sous le plancher du véhicule avant de le présenter au public, mais le dévoilement de la machine Scherl l’a forcé à présenter la première démonstration publique le 10 Novembre 1909.Le véhicule mesurait 12,2 mètres de long et 3 mètres de large. Il était équipé d’un moteur à essence de 20 CV et avait une vitesse de 35 km / h. La transmission était électrique.
Les véritables débuts publics pour le monorail Brennan l’ont été à l’Exposition Japon-britannique de White City, à Londres en 1910. Le monorail a transporté 50 passagers à la fois autour d’une piste circulaire à 20 km/h. Parmi les passagers, il y avait Winston Churchill qui a montré beaucoup d’enthousiasme. Bien que ce soit un moyen de transport viable, le monorail n’a pas réussi à attirer de nouveaux investissements. Sur les deux véhicules construits, l’un a été vendu à la ferraille, et l’autre a été utilisé comme un abri dans un parc jusqu’en 1930.
Le deuxième système, est plus petit que celle de Brennan, avec une longueur de seulement 5,20 mètres. Appelée “la machine de Scherl”, elle pouvait accueillir quatre passagers sur une paire de banquettes transversales. Les gyroscopes sont situés sous les sièges, et à axes verticaux, tandis que Brennan a utilisé une paire de gyroscopes à axe horizontal. Strictement parlant, August Scherl a simplement fourni le soutien financier.
Le mécanisme de redressement a été inventé par Paul Fröhlich, et la voiture conçue par Emil Falcke.
Après l’échec de Brennan et Scherl pour obtenir les investissements nécessaires au développement de leurs machines, des études ont été reprises à partir de 1910 par Piotr Shilovsky, un aristocrate russe résidant à Londres.
Le troisième et dernier système d’équilibrage était fondé sur des principes un peu différents de ceux de Brennan et Scherl, et utilisait un gyroscope plus petit et qui tournait plus lentement. Après avoir développé un monorail gyroscopique modèle en 1911, il a conçu un gyrocar qui a été construit par la Société Wolseley Motor et testé dans les rues de Londres en 1913.
Comme il utilisait un gyroscope unique, plutôt que de la contre-rotation paire comme Brennan et Scherl, il présentait une asymétrie dans son comportement, et devenait instable dans les virages serrés. Il a suscité un intérêt, mais aucun financement sérieux.
Utilisation / Innovations
L’effet gyroscopique est utilisé dans beaucoup de domaines pour stabiliser un objet en maintenant son orientation dans un repère galiléen. C’est l’effet qui permet à une toupie de rester verticale en équilibre tant qu’elle tourne suffisamment vite. L’effet gyroscopique est notamment utilisé pour stabiliser des caméras, repérer l’inclinaison en vol des avions et orienter des satellites.


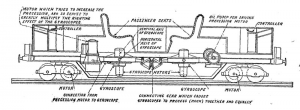
Le produit de Lit Motors est équipé de deux gyroscopes de très forte inertie, couplés et tournant en sens inverse à plus de 10 000 tours par minute autour d’un axe vertical. En couplant les informations d’un réseau de capteurs (surface de la route, météo (vent, pluie) , …) avec les commandes du conducteur ( direction, freinage, accélération, …), le véhicule pilote les gyroscopes.
Le mouvement de tangage opposé des deux gyroscopes permet de s’incliner selon un angle idéal pour la tenue de la route.
Les accéléromètres et les capteurs pilotent l’inclinaison des gyroscopes de stabilisation afin d’annuler le roulis du deux-roues, celui-ci reste quasiment verticale même en cas d’accident. Ce système est capable d’appliquer un couple allant jusqu’à 1700 Nm pour provoquer l’inclinaison du véhicule.
Lorsque les gyroscopes sont désactivé, une béquille motorisé empêche le véhicule de tomber.
L’utilisation du gyroscope permet d’avoir un véhicule réunissant la vitesse et la taille d’un deux-roues et la protection d’une voiture normale (ceintures de sécurité, airbags…). Il est équipé de son propre système breveté de récupération de l’énergie cinétique lors du freinage (KERS : Kinetic Energy Recovery System).
Son homologation en cours devrait autoriser sa conduite avec un simple permis voiture.