IV. Arduino
Potentiomètre
Afin de trouver une alternative à la vitesse de rotation nécessaire du rotor trop élevée, j’ai eu l’idée d’utiliser un second phénomène du gyroscope : la précession. Lorsque l’on fait tourner le gyroscope sur lui-même sur un axe, il créer une force perpendiculaire à cette rotation. En d’autres termes, sur notre train, si on fait pencher le gyroscope vers l’avant il créer une force qui fait pencher le train vers la droite et inversement. Il fallait donc utiliser un programme qui détecte l’inclinaison du train par l’intermédiaire d’un accéléromètre et qui incline manuellement le gyroscope avec un servomoteur.
Problème: impossible de stabiliser le train a la main, les effets sont trop rapides et trop brusques pour être controlés.

Accéléromètre
Le programme marchait très bien, quand on inclinait le train vers la droite, le gyroscope penchait vers l’arrière afin de compenser le déclin, et vice versa. Seulement, une fois le gyroscope lancé, de trop fortes vibrations ont perturbés l’accéléromètre.
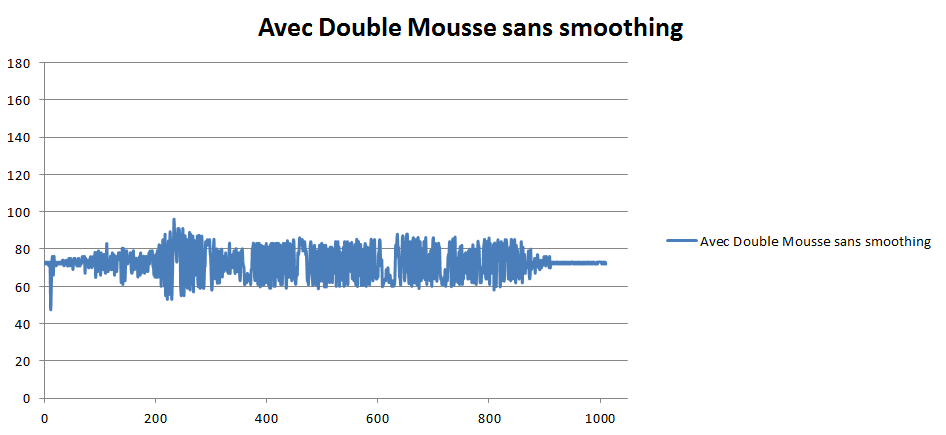
On a donc isolé le composant par différentes mousses dans l’espoir d’absorber ces vibrations causées par la chute involontaire du gyroscope.
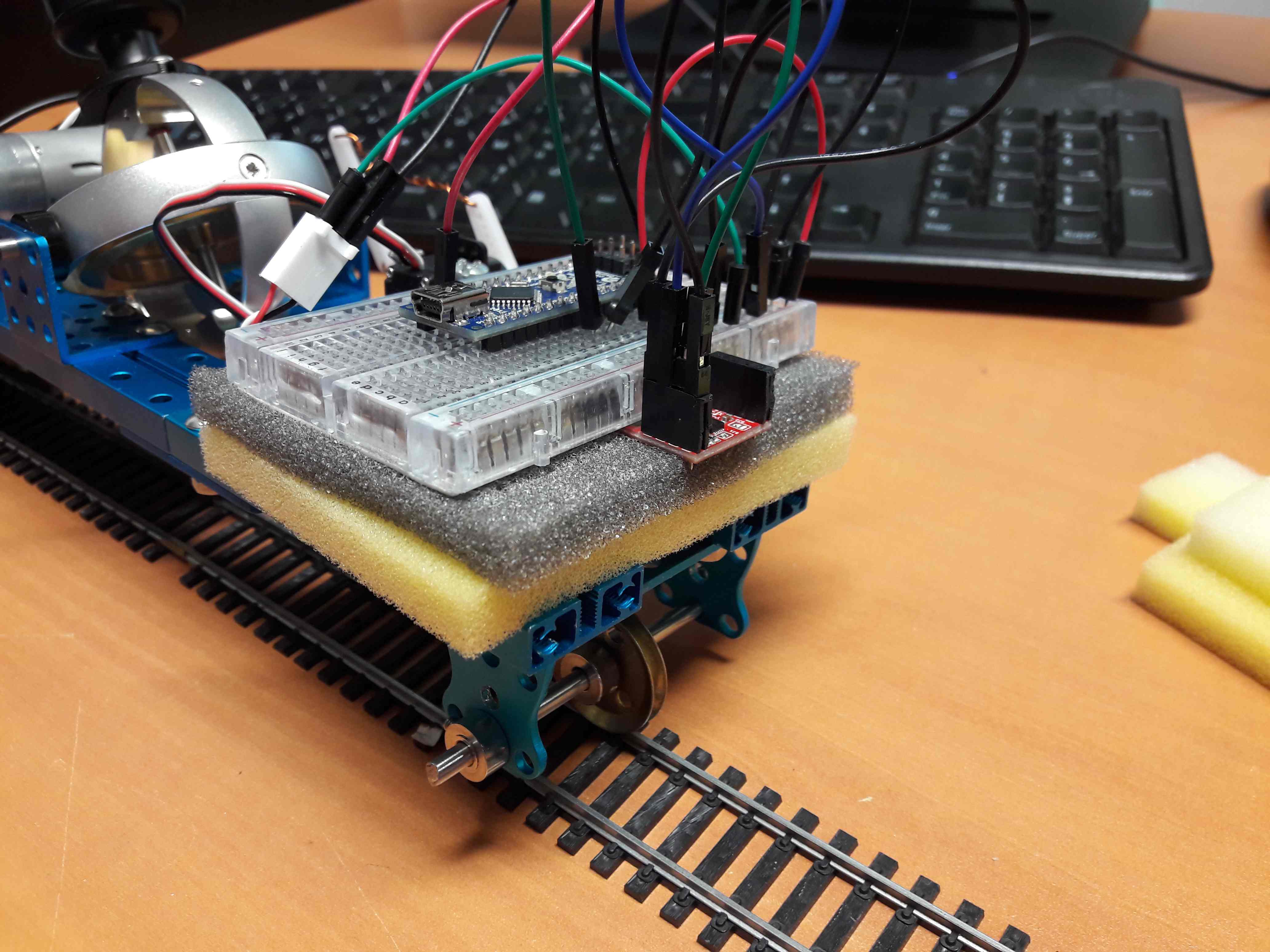
Smoothing
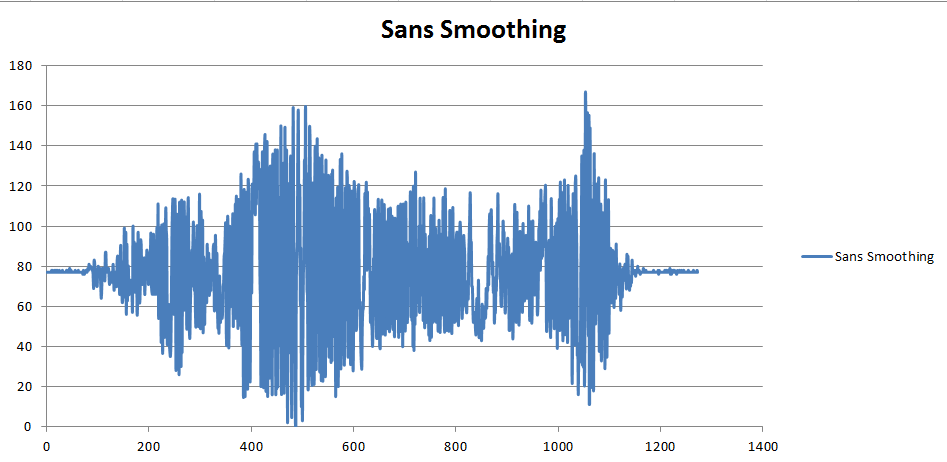
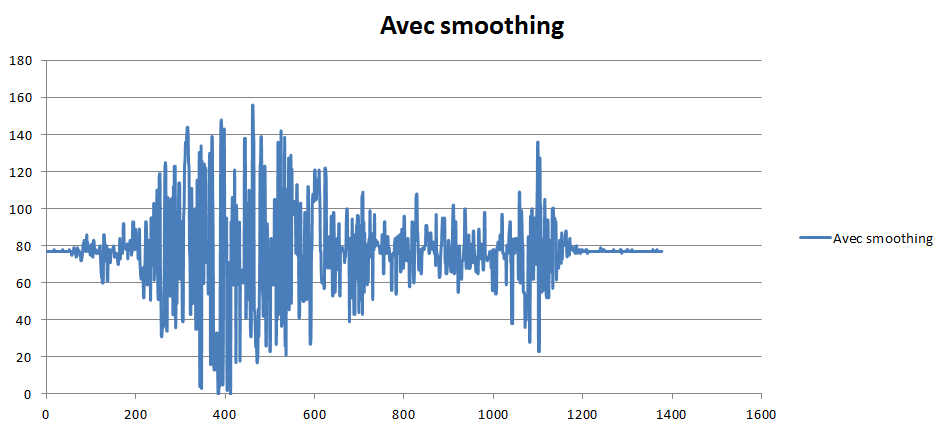
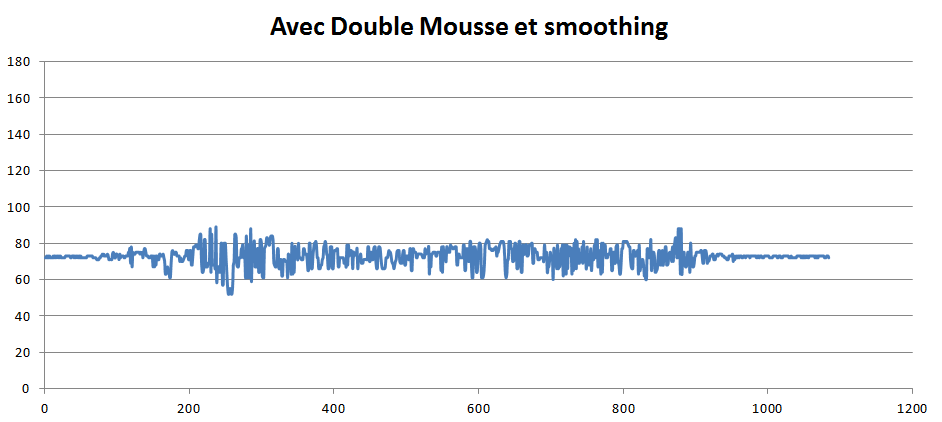
Les mousses fonctionnaient plutôt bien mais le résultat n’était toujours pas là. J’ai donc appliqué un « smoothing » sur les valeurs renvoyées par le capteur dans le programme Arduino. Cependant, ce lissage des valeurs n’était toujours pas suffisant et plus je lissais les valeurs plus le temps de réaction était long.
En récupérant les valeurs d’angle d’inclinaison de l’accéléromètre avec mousse et smoothing et sans mousse ni smoothing j’ai pu obtenir le graphique suivant sur Excel.